Astrometry calibration establishes mutual mapping between sky's coordinates and coordinates on frames. Astrometry is essential for any additional processing like photometry or frame composition.
Usage of a command line astrometry tool can be found in Astrometry manual page.
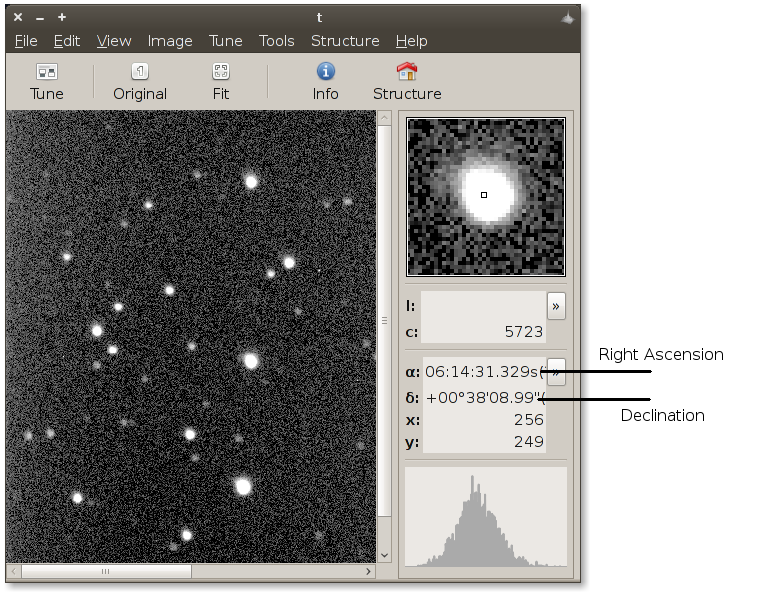
Astronomical instruments works as devices which projects spherical coordinates (Right Ascension α or Declination δ) onto rectangular coordinates of imaging devices. The projection establishes an unique mapping for all objects (pixels). The mapping is usually complicated (nonlinear) because projected images of sky may be deformed. The calibration can be considered as the two step procedure:
The calibration can be stored in FITS frame header as WCS (world-coordinate system) calibration which is described at reference Astrometry header page.
To describe of the astrometry calibration, Munipack uses carefully selected set of parameters. Parameters are easy for use (change in a single parameter doesn't affects others) and supports robust fitting.
All angles are in degrees. Also don't try use fractions like arcsecs or don't interchange degrees and radians.
Munipack provides following modes of the calibration of FITS frames:
Stars, detected on frames, are identified in an astrometric catalogue by matching. The parameters are estimated by fitting of the transformation. Matching is intended for general use.
User provides a sequence of identified stars and the transformation is derived from coordinates of the stars by fitting. It can be useful when matching has failed.
Manual mode just save a calibration in WCS conventions using of parameters αc, δc, c, φ and possible reflection provided by user. Any other information (detection of objects, catalogues) are not required. It can be useful when astrometry is already known.
These sources can be used as a references of the coordinates.
Note that the types of calibrations using catalogues and frames requires detected objects (see aperture photometry).
Projection maps spherical coordinates and rectangular coordinates. Just only Gnomonic is implemented yet.
No projection is useful for relative matching of frames.
Matching between objects on reference (catalogue) and calibrated frames is developed on base of a kind of backtracking algorithm. All possible combinations of triplets are generated from data and grouped to sequences. Sequences of catalogue and observed data is searched for minimal distance in the triangle space (an application of triangle similarity, one from basic triangle rules, known from first school years).
The backtracking is affected by parameters: --minmatch (minimal lenght of match sequence, --maxmatch (maximum length of match sequence), --sig sets a typical deviation of coordinates and --fsig is the dispersion in fluxes. Ones are important for fitting (and successful calibration).
An another method for matching can be also used by setting --match NEARLY. In this case, the correspondence between object's list is established by looking for nearest stars. An initial transformation needs to be known. The parameter --sig sets coordinate uncertainty.
The matched stars are used for fitting of a transformation (fit of scale, rotation) and projection (fit of centre of projection). The standard least-squares and robust methods can be used (--fit).
The catalogue is a FITS table with coordinates of objects. The table is usually a list of selected stars from a catalogue provided by a Virtual Observatory server.
The coordinates are arranged to a columns (defaulted to RA, DEC). Catalogue columns with coordinates can be selected with --col-ra, --col-dec parameters.
Manuals: Astrometry, Data Formats: Astrometry Header.